Cesar Quiroza, Darla Araújoa, Antonio de Arrudab, Paulo Kurkaa
aDepartment of mechanical design, University of Campinas, 200 Mendeleyev St., Brazil
bDepartment of materials and manufacturing, University of Campinas, 200 Mendeleyev St., Brazil
Abstract
Assistive technology (AT) is still a new term used to identify the entire arsenal of resources and services that contribute to provide or expand functional abilities of people with disabilities. AT services are usually trans involving professionals from various fields, such as physical therapy, medicine, engineering and so on. At work was used as a basis a wheelchair Jazzy with two engines and chain on the front wheels and two rear swivel caster wheels and powered by two rechargeable batteries each controlled by a joystick with control coupled to the vehicle speed. From this information it was installed at its base a kiddie chair intended for children between five and ten years. Furthermore, the control will be done remotely, and it became necessary a speed controller for two engines and purchased a radio control, microcontroller and ultrasonic sensor. Therefore the main objective of this prototype is to assist children with disabilities have the opportunity to drive a vehicle.
background
Assistive Technology (AT) has several definitions; however, for the purpose this paper it can be described as ‘… any item, piece of equipment or product system whether acquired commercially off the shelf, modified or customized that is used to increase, maintain or improve functional capabilities of children with disabilities’¹. It therefore covers a wide range of equipment from walking sticks to a voice output communication aid (VOCA), a shower chair to a complex environmental control system (Department of Health, 2004). Benefits and purpose of AT are in many respect self-evident in that it provides a gateway to the independence, dignity and self-esteem of some 4 million older or disable people and 1.7 million informal carers (Audit Comission., 2000) AT allow children to move around their environment, communicate with others and take part developmentally appropriate activities that they would be unable to do without technology. However, some critical aspects of AT industry in Europe were emphasized (Vernardakis, Stephanidis, & Akoumianakis, 1995), in particular with regard to innovation. The following limitations were notably identified: the characteristics of companies (e.g. segmentation in accordance with disabilities) or quasi-monopolistic competition; the influence of the third party supporting parts of the costs of Assistive Technologies (e.g. health insurance, power of associations); the lack of knowledge of end-users needs (needs related to using and purchasing AT). Specialized or medicalized products also bear the risk of stigmatizing their users (Coleman, Lebbon, Clarkson, & Keates, 2003) because they tend to emphasize the disability in the person’s social identity. Finally, although the global volume of the market may seem important, particularly if elderly people are included, it appears to be divided into numerous niches, segmenting the market as a function of user’s disabilities (motor, sensory or cognitive disabilities) or functional impairments.
The remote control remains one of the most cited examples of a technological innovation coming from the field of disability, but Universalist movements have provided many other examples of products, equipment and pieces of architecture that facilitate and improve everybody’s life (Keates & Clarkson, 2004) domestic appliances designed for people with strength or dexterity impairment (e.g. Oxo products, Panasonic’s accessible washing machine), urban architecture (e.g. curb, inclined planes) improving accessibility for people using a wheelchair, but also for parents using a baby stroller or travelers pulling a suitcase, and public transportation (e.g. Amtrack Acela Express, with all interior spaces accessible, improve signaling means, and accessible platforms).
Benefits of assistive technology
The average child has acquired an impressive range of skill is the five years of age. These include independence movement, play and communication (Cowan & Khan, 2005). They can in general feed, dress and clean themselves. They can operate equipment (televisions, videos, lights) within the home, access a wide range of toys and they can move throughout the home and the school environment more or less at will. Appropriately supplied and supported, AT can enable many children with physical disabilities to undertake all of these activities with differing levels of independence. AT can be used to address needs in relation to sensory impairment, learning, feeding, personal care, communication, mobility, posture and play.
While providing a powered chair to a child clearly provides the opportunity for that child to move around independently, the question arises at what age should AT be supplied? Does early provision of this equipment affect the development of a child? The research literature now offers an evidence base on which to support the early introduction of AT to children. Particular interest has been shown in the use powered mobility (Barnes, 1999) & (W Caan, 2000), however research has also looked at the global benefits of AT used for play, education and controlling the environment. (Lewis, 2000) reported the positive impact that switch-activated AT has in developing a child’s understanding that the environment is responsive and controllable. (Smith, 1994) described on the important role that communication devices play in a child’s total communication system.
PUrpose
The growing range of assistive technology for people with physical disability, with children or the elderly, we have sought independence of solutions to these people. In this article we build a prototype based on wheelchair, setting a babychair and being controlled remotely by a radio control and dodging obstacle through ultrasonic sensors using a Arduino Uno microcontroller. The focus of this work is enable children between 5-10 years of age with physical disability to control their chair and be controlled remotely, offering leisure, safety in daily life.
Method
RF Control
 Figure 1 - Block Diagram: Phases of the RF control system
Figure 1 - Block Diagram: Phases of the RF control systemWhile many devices are available to help people with lower levels of disability, people with a capacity of minimal or no movements (for example, people with quadriplegia) probably would need more assistance and they have very limited options for take care of themselves. AT help improve the quality of life for people with severe disabilities and considering these trends, are essential to help them; therefore it is necessary to use very specific skills that patients can do without problems (C Salem, 1997). The RF control has a signal receiver or pulse width whereupon is connected with microcontroller. The signal is send to turnigy control (joystick) which is responsible for direction control and velocity of the motors left and right as a show in the block diagram, divided in phases, in the Figure 1.
However, searching the literature for independent control systems that are used in radio control electric wheel chairs were not found. The objective of this work is to deal with a wheelchair with simple commands for movements with the joystick and avoid obstacles in an indoor environment accurately and easy to use interface, minimally invasive, low cost, reliable and discreet.
Phase 1
 Figure 2 - Flow diagram: Functional System
Figure 2 - Flow diagram: Functional System The phase one, wheelchair batteries have to supply +24 VDC to the motors, so it was decided to supply the system with +5 VCD with help from a high power voltage regulator, besides which the commands were programmed to detect obstacles and correct direction. When commands are configured, it is important to correctly position the sensors to get precision in the movement of the wheelchair. The programming of the commands is performed on the Arduino environment, using a microcontroller, ATMEGA328, which is located in the circuit board Arduino UNO for processing the signal of the magnetic control system with an I2C interface. To explain how it works microcontroller programming, Figure 2 shows more in detail the processes performed by the system. On the other hand, joystick and sensor circuits were added alternatively to control the movement of the wheelchair to connect analog and digital inputs to determine the directions that follow.
Phase 2 and 3
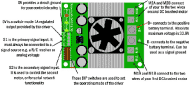 Figure 3 - Sabertooth 2x60 motor driver pinout guide
Figure 3 - Sabertooth 2x60 motor driver pinout guideThe 2nd and 3rd phase focuses on using a diver (H-Bridge) that receives signals from the microcontroller and this in turn provide the necessary voltage to the motors trough a PWM control technique. The driver used was a dual motor driver sabertooth 2x60; the first is the most versatile, efficient and easy to use on the market. Among its most important specifications are able to work with a 6V – 33.6V input voltage, output current: 60A per channel, 120A peak output current per channel, and 3 operating modes: analog, R/C and serial. As can be seen in Figure 3 are shown more details about input and output pins.
R/C input mode is used with a standard hobby Radio Control transmitter and receiver, or a microcontroller using same protocol. R/C mode is selected by setting switch 1 to the DOWN position and switch 2 to the UP position. If running from a receiver, it is necessary to obtain one or more servo pigtails and hook them up. If switch 6 is in the UP position, then the sabertooth is in standard R/C mode. This mode is designed to be used with a hobby-style transmitter and receiver. It automatically calibrates the control center and endpoints to maximize stick usage. It also enable a timeout failsafe, which will shut down the motors if the sabertooth stops receiving correct signals from the receiver.
Procedures
 Figure 4 - Tracking: Obstacle course to test performance of the electric wheelchair
Figure 4 - Tracking: Obstacle course to test performance of the electric wheelchairThe first stage is responsible for receiving commands from the radio control and issue to the signal receiver that is connected to the microcontroller which has been programmed to initiate the trajectory. This was simulated in a real environment of the institution containing obstacles as Figure 4 below. When there are no obstacles to wheelchair follow straight line as the command of the joystick. The microcontroller was used to also get data the ultrasonic sensor, the sensor check some obstacles close to 2000mm, the wheelchair brakes and takes another path, forcing the child to change direction.
Phase 2 and 3: Tracking to the test
 Figure 5 : Electrical scheme of the wheelchair with the implemented system: a) Photography; b) Scheme
Figure 5 : Electrical scheme of the wheelchair with the implemented system: a) Photography; b) Scheme For the last two stages, after which the signals were received and processed by the commands of the joystick and the microcontroller, the latter in turn generates new signals that carry the information for the speed and direction of rotation of the motors is responsible for generating the two PWM signals and the correct switching for changing the direction and rotation of motors. The Figure 5 below show the electric chair with the components used.
Results
The application with this mode of operation yielded satisfactory results in which the child is able to move her own wheelchair, either indoor or outdoor environment. The speed is adjusted according to the control voltage and sensitivity, making it safe for the child. Another factor that must be emphasized is child seat because it offers security to bearer wheelchair because it has seatbelts, allowing stability and safety during the trajectory.
Discussion
A prototype of wheelchair was development in order to provide the children with disability the opportunity experience independence move where they could learn to deployment driving abilities at your own pace with assistance of two controls, one used by the children and other grown up. Furthermore, this mobility provide independence, mental growth and include social these children with disability.
The ultrasonic sensor detects minimum distances that range between four centimeters or three meters, making this system inaccurate. In this paper we choose a low-cost system to which be making a product inexpensive. In this system could be adopt other wireless control, but we would need a other microcontroller integrating themselves two zig bee’s, one connected in the wheelchair and the other in wireless control. The main advantage of the system is to increase the information transportation from the wheelchair. Also, an important fact is the possibility to wireless control the wheelchair in open environment with the maximum distance of 1600 meters.
CONCLUSION
The work itself is to help children to have the opportunity to drive your wheelchair using a wireless control, making it independent, but anytime will there are obstacles, the wheelchair stop and changes direction until effected a new command, making the system safe in environments with larger spaces and a smaller amount of obstacles. However, another proposal would be a smartphone using internet communication with 3G or 4G and integrate an IMU for providing location data and trajectory data.
References
Audit Comission. (2000). Fully Equipped. London.
Barnes, M. (1999). Rehabilitation after traumatic brain injury. Brit Med Bull Trauma, 55: 927 - 43.
C Salem, S. Z. (1997). An isometric tongue pointing device. Proc. CHI 97, 22-27.
Coleman, R., Lebbon, C., Clarkson, J., & Keates, S. (2003). Introduction: from margins to mainstream. Inclusive Design: Design for the Whole Population. Springer.
Cowan, D. M., & Khan, Y. (2005). Assistive Technology for Children with complex disabilities. Current Pediatrics, 207-212.
Department of Health. (September de 2004). Acesso em October de 2013, disponível em www.pasa.doh.gov.uk/eat/docs/ECS_mar2004.doc
Keates, S., & Clarkson, J. (2004). Countering Design Exclusion: An introduction to Inclusive Design. Springer.
Lewis, M. S. (2000). Assistive technology for the very young: creating responsive environments. Infant Young Child, 12: 34-52.
Smith, M. (1994). Speech by any other name: the role of communication aids in interaction. Eur J Discord Commun, 29:225-40.
Vernardakis, N., Stephanidis, C., & Akoumianakis, D. (1995). On the impediments to innovation in the European assistive technology industry.
W Caan, I. S. (2000). A joint health and social services initiative for children with disabilities. Br J Community Nurs, 5: 87-90.
ACknowledgement
I appreciate the guidance of faculty authors of this article and the financial support of the Research Foundation of the State of Amazonas (FAPEAM).
Audio Version PDF Version